
Projects
TOC
Robotic Autonomous Trolley Collection
Distributed Consensus of Constrained MAS under Directed Graphs
Centralized Multi-Robot Task Allocation
Robotic Autonomous Trolley Collection
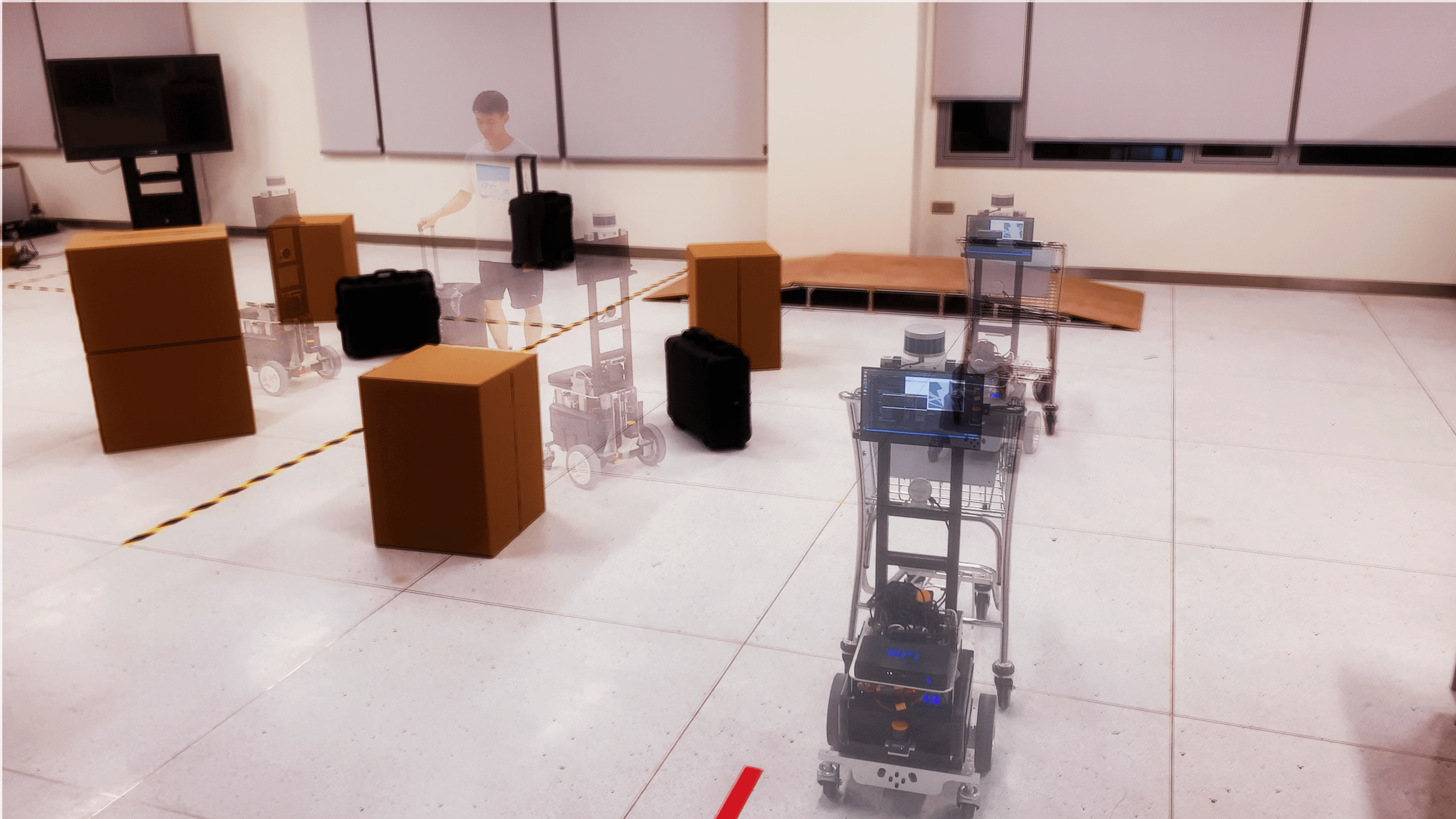
(An autonomous robotic collecting system incorporating detection, safe navigation, manipulation, and transportation.)
- Advisors: Prof. Max Q.-H. Meng (Fellow, IEEE); Prof. Jiankun Wang
- The objective is to bring about a systematic solution to robotic autonomous trolley collection in complex and dynamic large-scale environments, like international airports.
- This integrated system renders itself a challenge involving object detection, estimation & prediction, localization, efficient & safe planning and control, and robust mechanical design.
- Please see this page or refer to our ICRA 2022 paper for details.
Distributed Consensus of Constrained MAS under Directed Graphs
(Simulation results powered by the Robotarium )
Advisor: Prof. Jie Mei (Google Scholar)
- We aim to provide a distributed leaderless consensus algorithm framework for a type of continuous-time linear multi-agent systems with time-varying asymmetric state constraints, uncertainties, and disturbances under time-varying directed topologies.
- Theoretical proof, numerical simulations and physical experiments are presented.
- Please see this page for details.
Centralized Multi-Robot Task Allocation
- Advisor: Prof. Hui Cheng @ SYSU
- Team: Hao Luan, Yanheng Wang, Zihao Zeng.
- Designed and implemented a centralized offline task-allocation algorithm for multi-robot systems based on the Ant Colony System.
- Compared with a conventional optimal DFS algorithm, simulation showed time-consuming ratios down to 1/2400 and relative errors below 10% in dense directed graphs consisting of up to 20 vertices.